
AI機器人精準動作 感測器Does Matter

機器人技術(Robotics)為現代科技的重要領域,其內容涵蓋相當多層面的技術融合,包含機械設計、自動控制、人工智慧(AI)、感測器技術(Sensor Tech)、物聯網(IoT)、精密致動 等等…。從以往傳統的工業機器人到近期的智慧型機器人,其技術持續蓬勃發展,並廣泛應用於製造、醫療、服務、軍事、農業等領域。
機器人技術可認知為是一種能夠自主或半自主執行動作任務的複合系統,大致由以下幾個核心子系統來構成:
- 控制系統(Control system):負責接收感測器數據與系統命令訊號並執行決策,通常包含微控制器(MCU)、嵌入式運算模組、AI模組,並包含軟體演算法。
- 致動系統(Actuators system):行為動作的執行部件,如馬達模組、減速機模組、液壓或氣壓傳動模組,並與機械結構連動。
- 感測系統(Sensor system):獲取環境資訊與自身狀態的關鍵部件。
- 電源系統(Power system):提供各系統運行能量,如電池模組跟電力轉換器。
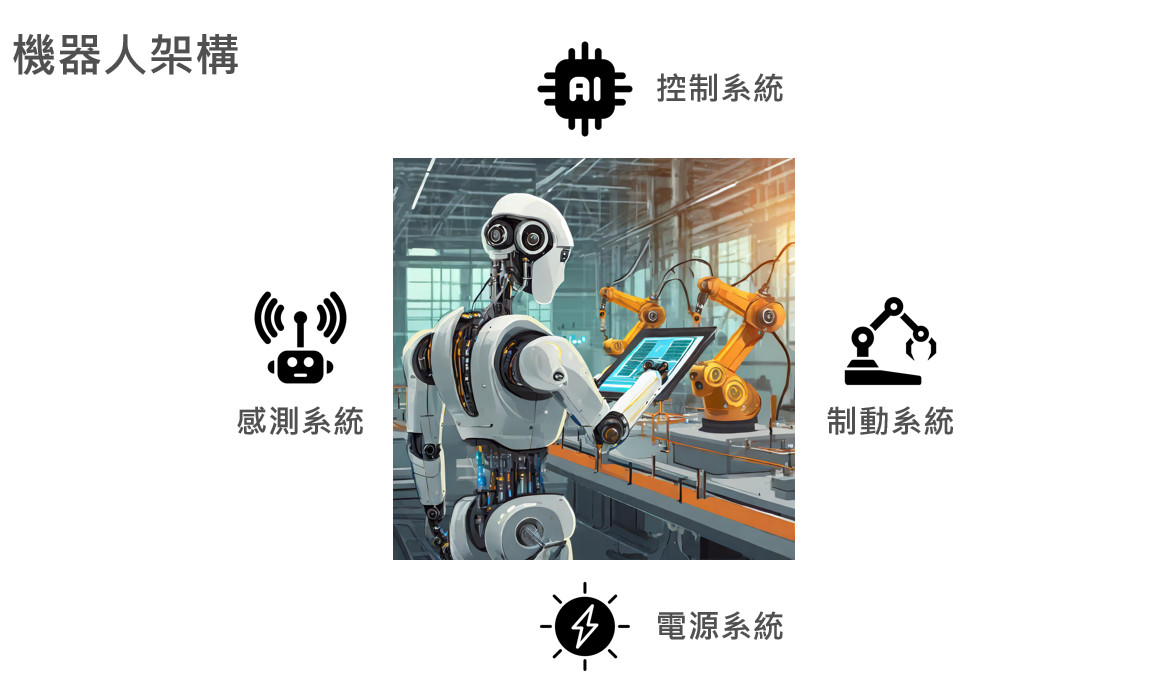 圖一、機器人架構
圖一、機器人架構
機器人感測器概述
而接下來本文將著墨於感測器技術在機器人中的應用說明,人體透過視覺、聽覺、觸覺、嗅覺等等各種感官來感知世界,而機器人就透過感測器來實現環境感知以及動作執行過程的即時訊號回饋,讓系統運作流暢。
主要類型包括:
- 視覺感知(Vision Sensing)則有攝影機與光學感測,能提供基本影像資訊,如顏色、形狀、物件識別,搭配紅外線感測加強夜視或熱成像能力,進階型更結合雷射測距帶來更多立體空間的訊息。
- 聽覺感知(Hearing Sensing)適當的設計擺設麥克風陣列用於語音識別與環境聲音分析,搭配智慧助理的軟體服務可完成交互回應功能。
- 觸覺感知(Touch Sensing)透過力度感測器與壓力感測器則能回饋機器手的抓握程度,避免過度施力造成損毀跟傷害。
- 嗅覺感知(Smell Sensing)搭配氣體感測器來偵測環境裡的有毒氣體、可燃氣體、二氧化碳、一氧化碳等等,可預防危險發生。
- 味覺感知(Taste Sensing)利用化學感測器與生物感測器去分析待測物的成分和細菌汙染物等等,來確保品質與安全。
- 平衡與內部感知(Proprioception Sensing)這對機器人的整體動作協調非常重要,現行主流使用慣性測量單元IMU (Inertial Measurement Unit),內含加速度計與陀螺儀,用於測量姿態與平衡,以及在各個行動環節置入位置感測器,讓每個動作都有高精度回饋到控制模組,能更準確完成。
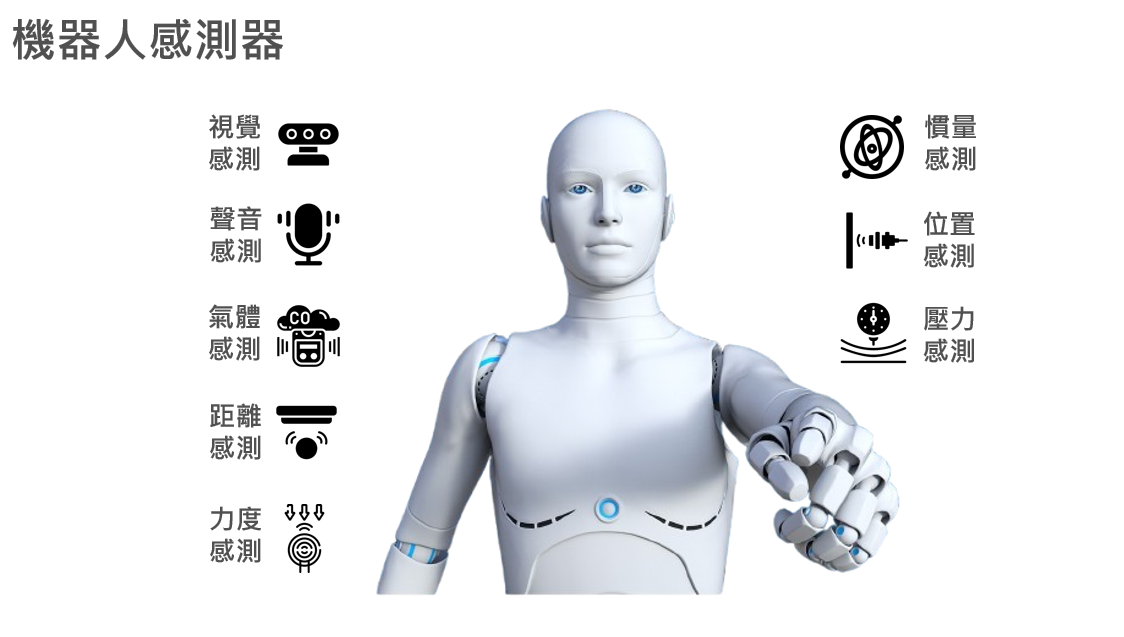 圖二、機器人感測器概述
圖二、機器人感測器概述
感測器訊號處理流程
感測器系統要讓收集到的環境資料精確且有效,首先對各個感測器的訊號反應做擷取校正程序,初始收集到的訊號通常包含雜訊、偏移或變異,則會需要進行預處理,通常利用下列方式:
- 濾波 (Filtering):使用低通、高通、帶通、帶阻濾波器先去除不必要的頻率成分,再搭配信號系統的數位濾波器,像是FIR 濾波器 (Finite Impulse Response)跟IIR 濾波器 (Infinite Impulse Response),透過數學運算做進階處理。
- 降噪 (Denoising):降噪技術則專注於減少隨機雜訊,同時保留關鍵訊號資訊,小波變換(Wavelet Transform)、卡爾曼濾波(Kalman Filter)、自適應濾波 (Adaptive Filtering) 等方法可用於消除雜訊。
- 校正 (Calibration):感測器在使用前或使用一段時間後,可能會產生漂移 (Drift)、偏移 (Offset)、比例誤差 (Scaling Error),影響測量準確度,定期進行校正以確保測量結果可靠,一般執行校正流程可分為初始測試、校正模型建立、補償與驗證。
當前端收集到的訊號是完整且為可靠數據後,接著會進行特徵值提取 (Feature Extraction),是一種將原始訊息轉換為更具代表性的資訊,降低數據維度、提升分類與識別的準確度,目標是提升後續處理的效率,而依據訊號類型特徵可分為時域特徵 (Time Domain Features)、頻域特徵 (Frequency Domain Features)和時頻特徵 (Time-Frequency Features)。
最後則進入到模式識別 (Pattern Recognition),核心價值在於從數據中學習並識別出不同類型的有效模式或結構,而分類 (Classification) 是模式識別的關鍵步驟,根據已知的數據來將新的數據分類到某個預定的類別中,隨著機器學習(Machine Learning, ML)、深度學習(Deep Learning, DL)、強化學習 (Reinforcement Learning, RL) 等技術的發展,進而到AI 模式識別 (AI-based Pattern Recognition)高度強化識別與分類資料,準確性和應用領域得到了顯著的提升。
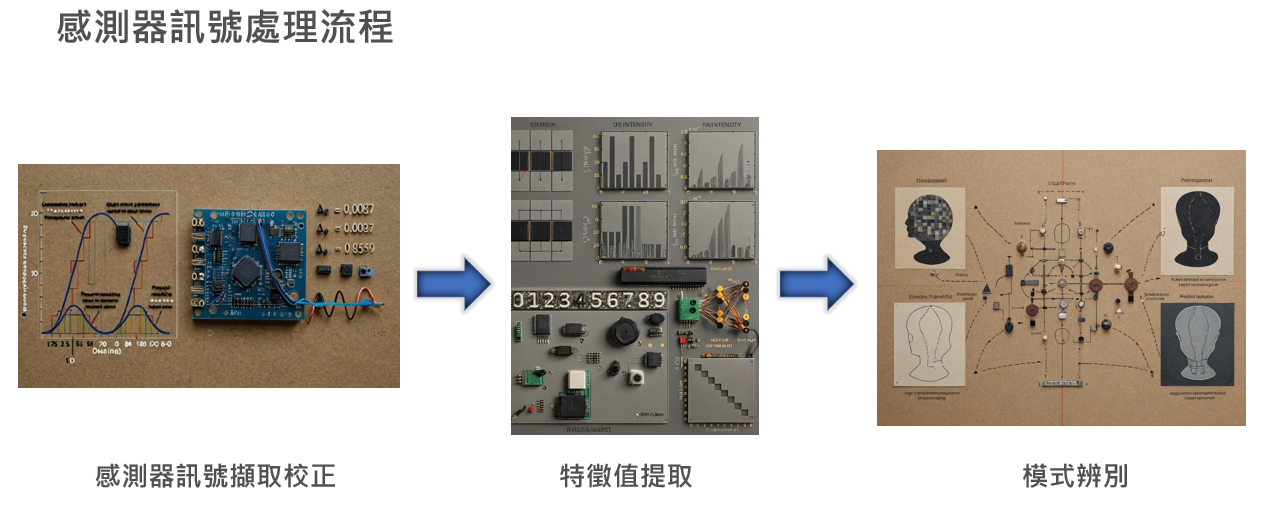 圖三、感測器訊號處理流程
圖三、感測器訊號處理流程
感測器融合
在各種感測器之間如何有效協同工作,感測器融合 (Sensor Fusion)技術就相當重要,意指來自多個不同類型感測器的數據進行整合與處理,讓有特性關聯的感測器資料透過演算整合為更高功能性內容,從而獲得比單一感測器更精確、穩定或豐富的資訊,以提供更可靠的感測結果往主系統傳遞,來提高對環境的理解。
感測器融合的方式可以根據不同的需求和應用,分為幾種類型:
- 低層融合 (Low-Level Fusion):直接將來自感測器的原始數據進行合併或融合。這種方法主要在數據層次進行融合而會關係到多感測器數據同步,如視覺相機與距離感知數據融合,結合視覺信息與距離測量信息來更準確辨識。
- 中層融合 (Middle-Level Fusion):涉及從每個感測器模組中提取有效特徵再進行融合,然後進行進階分類跟識別,像是在機器人導航中,將來自光學雷達LIDAR(Light Detection And Ranging)和視覺系統結合,從而更好地識別障礙物和環境結構。
- 高層融合 (High-Level Fusion):通常是將來自不同感測器系統其計算後的高層內容(如分類結果、推理結果等)進行合併或比對,以得出最終的結論,舉例在自走運動過程,將來自視覺距離偵測系統的物體識別結果與慣量姿態平衡系統結果進行融合,生成準確模型來讓主系統得到能夠去讓制動系統穩定運行的學習資料。
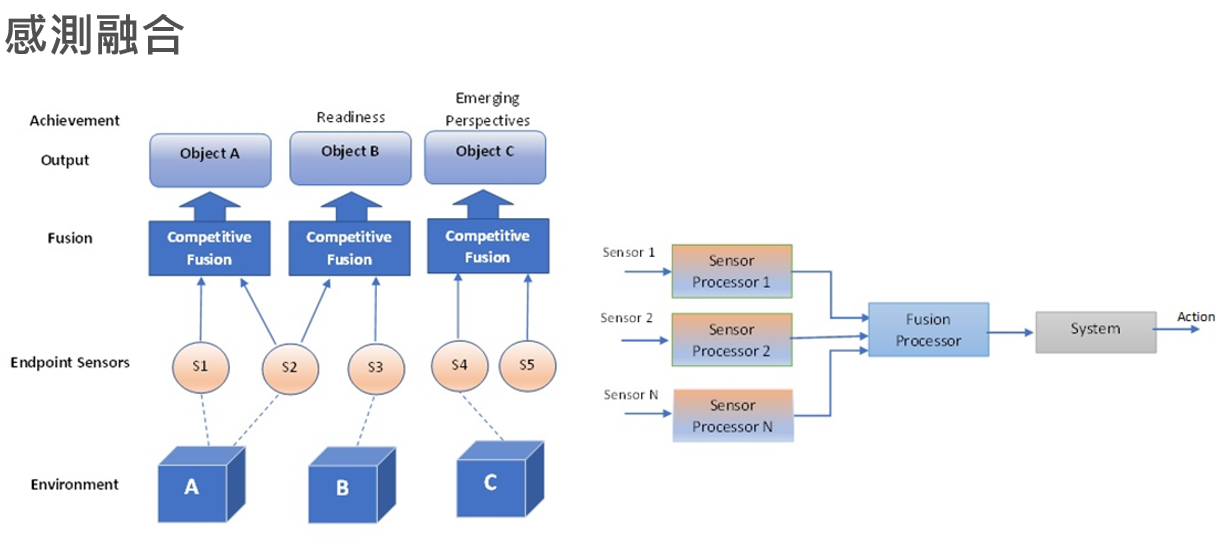 圖四、感測融合
圖四、感測融合
結語
機器人感測是一個關鍵的研究領域,為因應更多複雜環境讓未來感測器創新發展面向與潛力無窮,如可穿戴與微型機器人會追求低功耗與無線感測技術,
而更精細的感測發展讓將具備更接近人類感知能力,甚至達到人體仿生技術,
在積極導入人工智慧學習使機器人能夠更智能地感知環境、適應變化和進行自主決策來提升安全性與互動性,使其更像智慧助手,進一步提升自動化與人機互動的體驗,能帶給人類社會更多福祉。
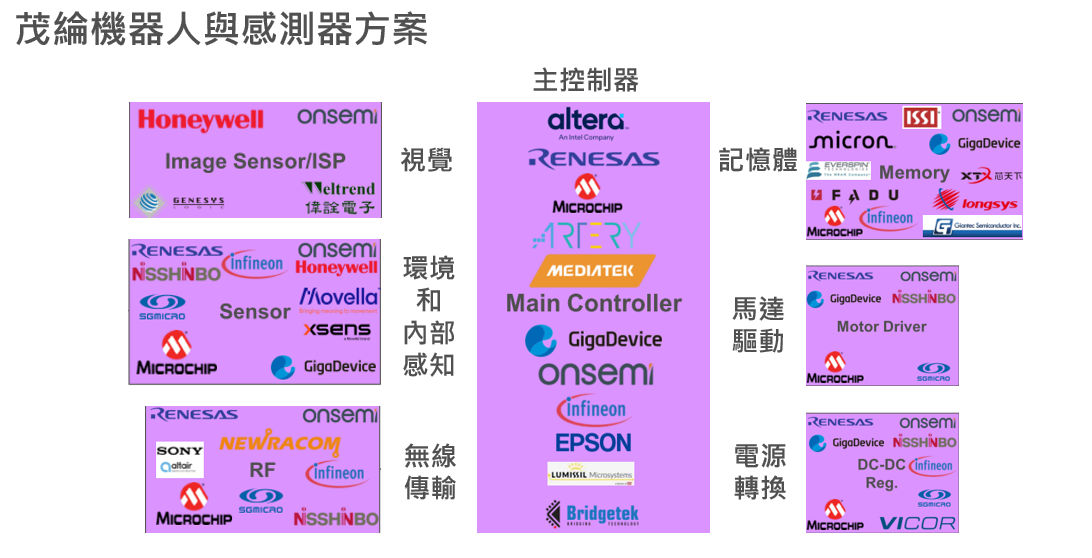 圖四、機器人與感測器方案
圖四、機器人與感測器方案
參考資料或文獻
You may also want to know





相關連結
追蹤我們的社群平台!




©Copyright 2026 Macnica Galaxy Inc.