
解析馬達(Motor) 類別應用探討

在進入解析馬達類別前先探討一下馬達的定義。什麼是馬達?一般是指在接受電力能源後轉換為動力能源的電動機,也就是在磁場內經通電後將受力切換成旋轉動作,並藉此提供能量。在日常生活中如:家用產品如洗衣機、冰箱…等,而在工業產品,如:無人搬運機、機械手臂或是車用產品電動車、電動機車…等都不難發現馬達的身影。近幾年隨著科技發展,人們更是追求生活上的方便性、舒適性、安全性;因此在此需求下也使得馬達應用更為廣泛。
若以輸入電源來做區別的話,馬達可大致分為兩類:直流馬達 (Direct Current Motor, DC Motor)與交流馬達( Alternating Current Motor, AC Motor)。
直流馬達種類
直流馬達可分為有刷馬達 (Brush Motor)、無刷直流馬達 (BLDC)、步進馬達 (Stepping Motor) 三種。
有刷馬達
一般產品設計時常使用到的馬達大多稱之為DC馬達。透過所謂的 ”刷子” (定子方Stator)的電極依序與 ”整流子” (電機子方或整流子或換向器Commutator) 接觸進行電流切換來產生旋轉的動作。而有刷馬達的構造包含定子、轉子、磁鐵、線圈等 (圖一)。
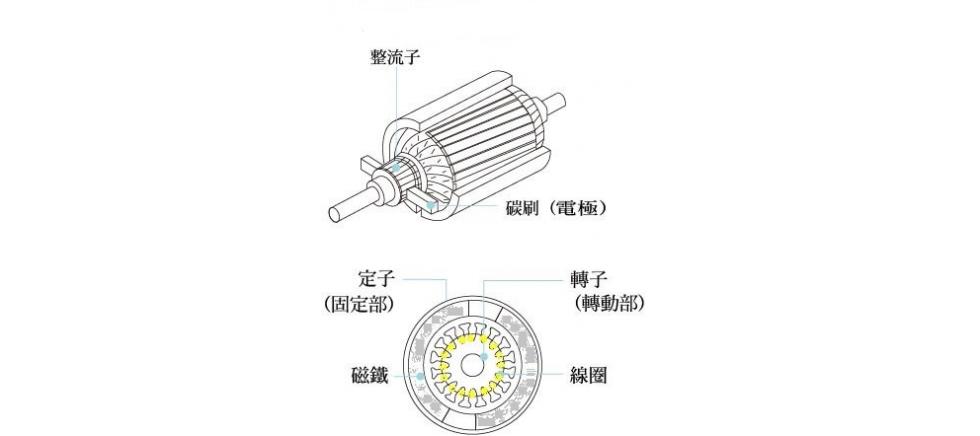 圖一
圖一
無刷直流DC馬達
{kind=link}
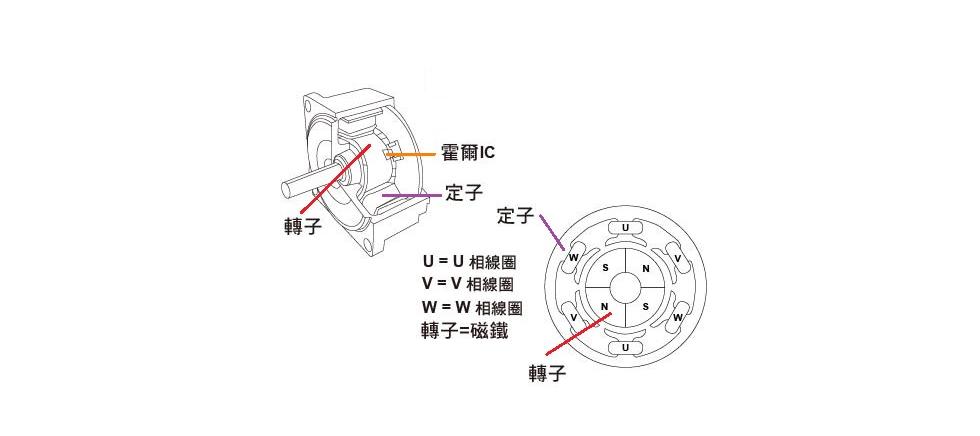 圖二
圖二
步進馬達
步進馬達為跟脈衝電波同步作動的馬達,也有稱之為”脈衝馬達”。其特徵為可以簡單的決定位置旋轉。
步進電機是一種特殊的無刷直流電機,電磁線圈布置在電機的外部,電機的中心有一個鐵或磁芯附在軸上。通過對線圈電壓進行排序,並且以相對較低的成本實現精確的旋轉控制。控制方式通常是開環的,所以系統不知道電機是否失速或是與控制器失去同步。而結構上包含定子、轉子、磁極、線圈…等 (圖三)。
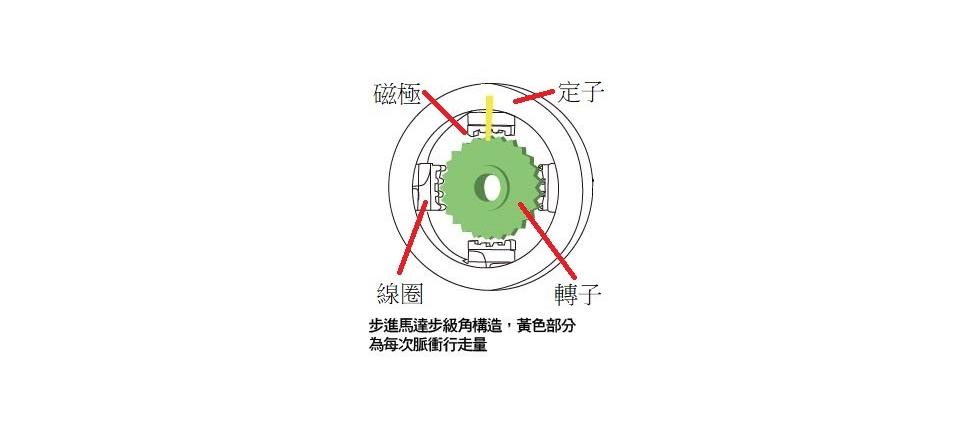 圖三
圖三
小結
直流馬達是透過電壓大小來控制馬達的轉速與轉向,所以在控制上比較容易,但是直流馬達卻不適合運用在高溫或是易燃的工作環境。通常直流馬達都是透過碳刷來做為電流轉換器,因此直流馬達在運轉後,固定的一段時間就必須清理碳刷摩擦所產生的髒污,確保馬達能正常持續運轉。
直流無刷馬達、有刷馬達 兩者特點比較表
| 特點 | 直流無刷馬達 | 直流有刷馬達 |
|---|---|---|
| 體積與重量 | 體積較小與重量輕 | 普通 |
| 轉子慣性 | 較低 | 普通 |
| 高速度運轉性能 | 較好 | 較差 |
| 效率 | 較高 | 普通 |
| 溫升 | 較低 | 較高 |
| 低速扭力 | 較好 | 普通 |
| 保養 | 較無須保養 | 需定期保養 |
| 過附載能力 | 較好 | 普通 |
表一
交流馬達種類
交流馬達 (Alternating Current Motor, AC Motor),可分為誘導馬達 (Asynchronous motor or Induction motor)及同步馬達 (Synchronous Motor)等兩種。
有刷馬達
透過交流電使 ”定子” 產生旋轉磁界、轉子發生誘導電流,藉由其相互作用進行旋轉,誘導電動機為日本說法,我們一般習慣稱為異步電動機或感應發電機。
異步電動機 (asynchronous motor) 也稱為感應電動機 (induction motor),簡稱 IM 或 ACIM。我們也可透過圖四舉例來了解異步發電機 (三項四級) 繞線方式。在圖四中的U / V / W則是所謂的三項,而四極則是由箭頭循環之處所產生的四極。
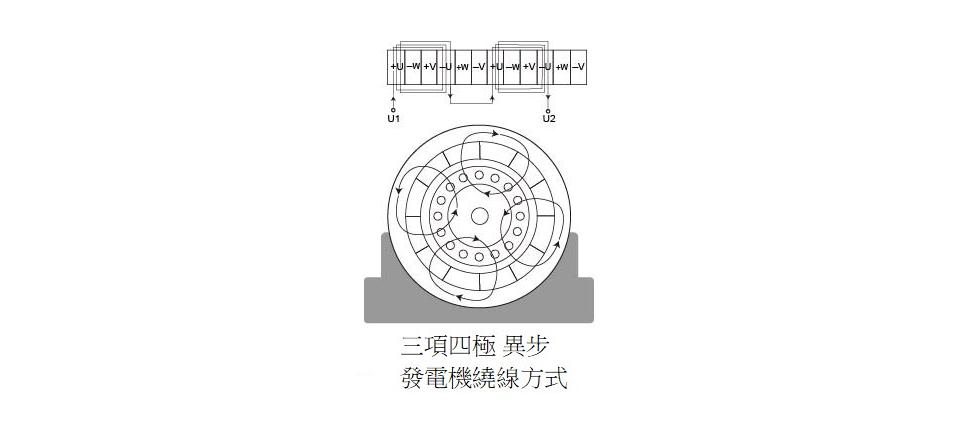 圖四
圖四
同步馬達
磁極的轉子因為交流電產生的磁界因而吸引、追隨、產生旋轉動作。在同步馬達的轉子有電磁鐵或是永久磁鐵,如果使用永久磁鐵則稱為永磁同步馬達。同步馬達的定子所產生的磁場吸引轉子磁場的異極,由於定子所產生的磁場是以若干速度旋轉,因此轉子會隨著定子磁場的旋轉速度,以相同的速度旋轉。
同步馬達的特性是轉速固定,不受電源電壓的影響。只要馬達的負載低於其最大轉矩,轉速也不會受負載的影響。由於這種特性,同步馬達只能使用變頻器進行調速。同步馬達結構上包含定子、轉子、定子繞組、永磁體等(圖五)。
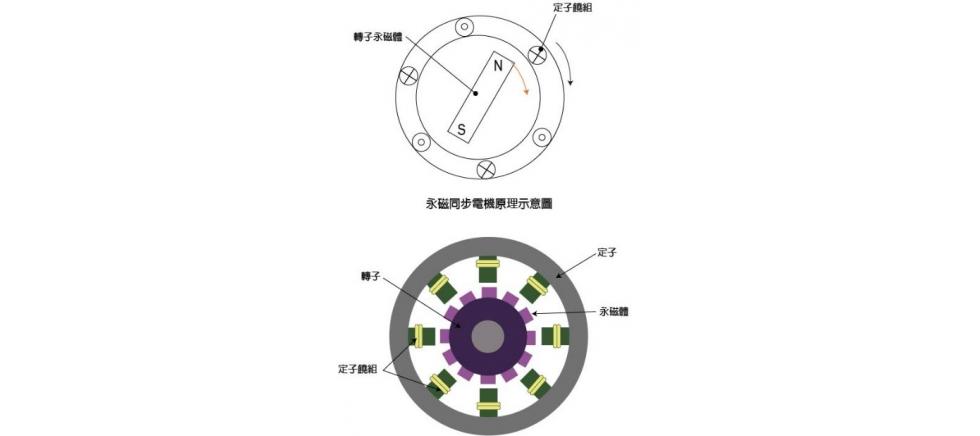 圖五
圖五
小結
交流馬達比直流馬達較適合運用在高溫與易燃的工作環境,並且沒有碳刷自然也就無需定期做清潔的動作。交流馬達是透過交流電的頻率來控制轉速,而透過電壓來控制馬達的扭力,因此在控制上會比直流馬達較為困難。
誘導馬達與同步馬達比較表
| 馬達種類 | 優勢 | 劣勢 |
|---|---|---|
| 同步馬達 | 轉距密度,功率密度高,效率高,調速性能高,體積小,重量輕 | 成本高,溫差變化較大易退磁,高位震動可靠較差 |
| 誘導馬達(異步馬達) | 結構簡單,可靠度高,成本低,弱磁易控制,加速性能,高速性能較優 | 轉距密度,功率密度低,效率低,需配備冷卻系統,體積大,重量重 |
表二
備註1: 轉矩密度是指單位體積上電機軸上輸出的額定轉矩。
備註2:功率密度(或體積功率密度或體積比功率)是每單位體積的功率(能量傳輸的速率)。對於能量轉換器(如電池、燃料電池、馬達)等,還有電源供應器或類似機器,功率密度基於其體積。於是又稱為體積功率密度,單位是W/m3。
馬達轉速計算公式
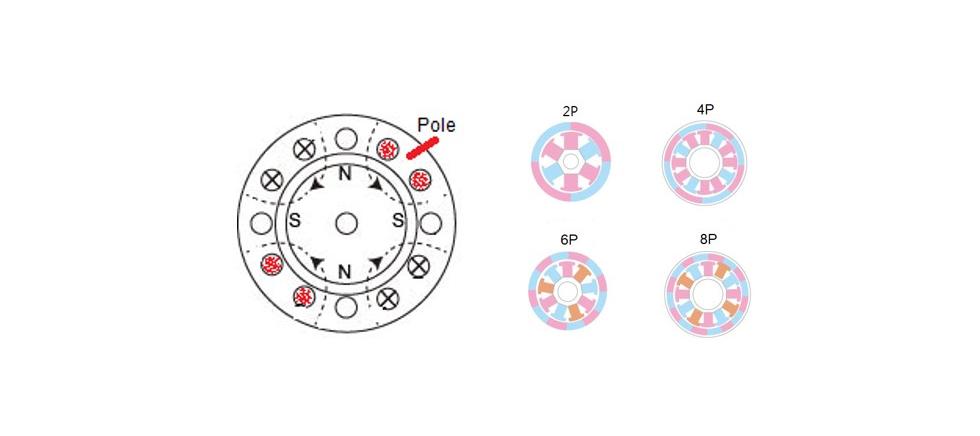
馬達通常使用RPM (Revolution Per Minute)來表示轉速單位,而RPM是以分鐘來做時間的基準也就是說1分鐘內馬達轉速的圈數。舉例來說,該馬達規格標明具有1,200 PRM 則表示這一分鐘內該馬達可轉動1,200圈,若以多相馬達則規格上可能會載明馬達極數P, 馬達極數是以P (Pole)為極數單位, 極數是指定子磁場磁極的個數以三相馬達為例每組馬達線圈都會產生N和S磁極(如圖六所示), 馬達每相含有的磁極個數是指極數, 由於磁極都是成對出現所以一般馬達常遇到的極數為2P /4P /6P /8P /12P。
而如果我們要知道轉速與頻率為多少則可透過公式一來獲得:
公式一:RPM=F*120/P ( F為頻率,單位以赫兹HZ表示;P為極數;120為常數 )
假設輸入頻率為60HZ的馬達,而馬達的極數為4,那我們可透過公式得知
RPM=60(F)*120/4(P)=1800,則轉速為1800RPM,如果極數為6P則轉速為1200PRM;8P 則為900RPM。
 圖六
圖六
而如果我們要知道轉速與頻率為多少則可透過公式一來獲得:
公式一:RPM=F*120/P ( F為頻率,單位以赫兹HZ表示;P為極數;120為常數 )
假設輸入頻率為60HZ的馬達,而馬達的極數為4,那我們可透過公式得知
RPM=60(F)*120/4(P)=1800,則轉速為1800RPM,如果極數為6P則轉速為1200PRM;8P 則為900RPM。
直流無刷馬達與交流馬達比較
| 馬達 | 傳統交流馬達 | 直流無刷馬達 |
|---|---|---|
| 噪音 | 有明顯交流產生的聲音 | 完全靜音 |
| 體積/重量 | 體積大,重量比直流馬達重約3分之1到2分之1 | 體積小,重量輕,僅傳統交流馬達的3分之2到2分之1重量 |
| 扭力 | 扭力小 | 高扭力 |
| 轉速 | 受電壓頻率控制,沒辦法調整 | 可以無段變速,容易控制 |
| 溫升 | 溫升高度約95度 | 溫升低,約40~45度 |
| 使用時間 | 使用的壽命較短 | 使用的壽命較長 |
表三
馬達產品應用市場現狀
針對馬達產品市場趨勢,多功能和高性能的需求不斷增加,因此,在設計廠商面臨到的是必須開發更大更複雜的系統,並且需要額外的生產成本(收集零件、組裝良率損失、BOM 管理等)相對增加,並且在電路板需要更大的PCB尺寸,而在功耗與增加電池壽命問題上也是持續的一種挑戰。
而在馬達的設計廠商產品要求範圍廣、產品週期越來越短,因此造成開發時間短和管理高混合性小批量產品、開發成本增加(製作多種類型的PCB,為每個製作軟件,可靠性,庫存等)。 如果以全球無刷市場整體情況舉例來說,其中日本、德國、美國、英國…等國家的知名品牌公司憑藉數十上百年的生產製造經驗和關鍵技術,仍然影響著無刷馬達的發展,並掌控了大部分高檔、精密、新型無刷馬達的技術與產品。而德國、日本、美國在機密儀器中是最具代表性的國家,代表著世界先進技術水平,對全球無刷馬達有著較大的發言權。
MACNICA Galaxy Motor Related Solution
在解析馬達類別應用探討後,我們可知道馬達種類繁多,那下一步就是要了解如何去選擇驅動馬達控制器與同時確認是否須加上額外偵測器來知道馬達在運轉時的位置,進而選擇處理器 (大多常見以方波進行控制馬達控制器),之後規劃產品的通訊界面,即可視產品需求選擇有線或者無線介面來做傳輸資料使用。當然在選擇完大部分的元件後則須提供相對應的輸入電源,最後再針對安全部分加入保護機制;以下是我司針對馬達可提供的相關產品方案。
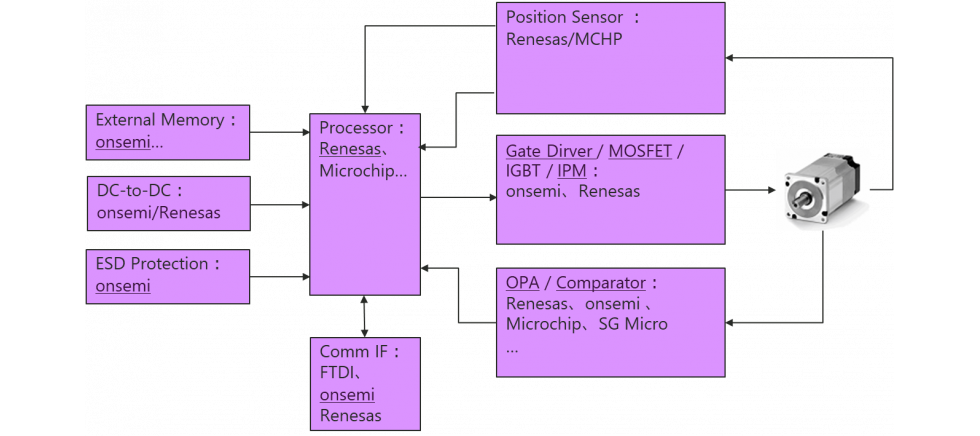 圖七
圖七
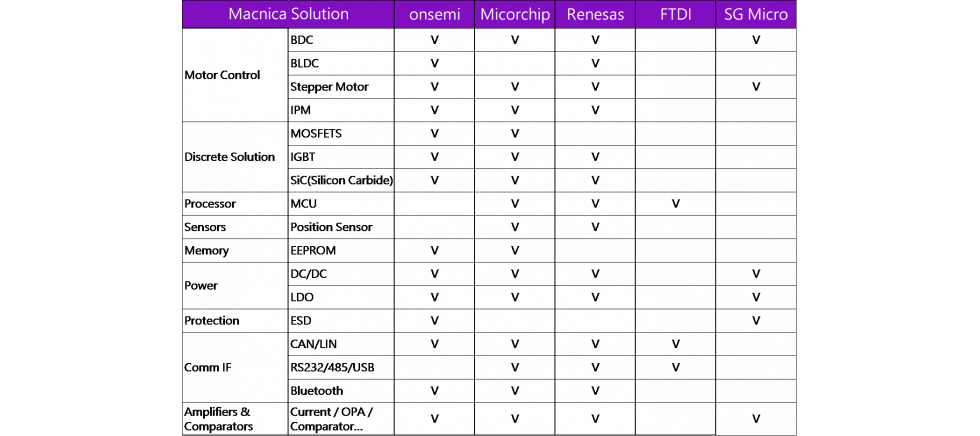 表四
表四
參考文獻
- Motor Drivers, ONSEMI, https://www.onsemi.com/products/motor-control/motor-drivers
- 直流有刷馬達與無刷馬達之差異與比較, 林慶曜, https://www.shs.edu.tw/works/essay/2008/10/2008102923422666.pdf
- 永磁同步電機與感應非同步電機的差異化在哪, 玩車教授, https://daydaynews.cc/zh-tw/technology/226973.html
- 電動輪椅上應用,何謂DC無刷馬達, 鉑康, https://reurl.cc/MblKp4
- 步進馬達, 維基百科, https://zh.wikipedia.org/wiki/%E6%AD%A5%E9%80%B2%E9%A6%AC%E9%81%94
- 異步電動機, 維基百科, https://zh.wikipedia.org/wiki/%E5%BC%82%E6%AD%A5%E7%94%B5%E5%8A%A8%E6%9C%BA
- 永磁同步電動機怎樣產生動力, 澄柏國際股份有限公, https://www.cp-mg.com/27704309132151627493386512120527231245902717129986299832120521147.html
- 電機極數, Baidu百度, https://baike.baidu.hk/item/%E9%9B%BB%E6%A9%9F%E6%A5%B5%E6%95%B8/2096572
Links
Follow us on Macnica Galaxy social media




©Copyright 2026 Macnica Galaxy Inc.