
電感式位置感測器於 AI 與機器人系統中的工程應用與技術解析

隨著人工智慧(Artificial Intelligence, AI)、工業機器人與協作型機器人(Collaborative Robots, Cobots)在智慧製造與自動化系統中的廣泛部署,高精度且高可靠度的位置與運動感測技術已成為影響系統整體效能與安全性的關鍵因素。本文針對常見旋轉位置感測技術進行工程層級比較,分析其在高污染、高震動與強電磁干擾環境下的限制,並聚焦於電感式位置感測技術的工作原理、系統架構與工程優勢。透過雙電感式位置感測器之實例,說明其在 AI 驅動的運動控制、機器人即時回授與預測性維護中的應用價值,並探討其於工業與汽車安全關鍵系統中的可行性。

前言(Introduction)
在現代智慧製造與機器人系統中,AI 演算法已逐漸由高階決策層延伸至即時運動控制層,例如模型預測控制(MPC)、強化學習(Reinforcement Learning)與自適應控制等方法。此類演算法對感測資料的即時性、解析度與長期穩定性具有高度依賴性,因此位置感測器的量測誤差、漂移與環境敏感度,將直接影響控制模型的收斂速度與系統穩定度。
在此背景下,傳統僅以成本或單次精度為導向的感測器選型方式已不敷使用,必須從系統工程角度重新檢視感測技術在 AI 與機器人應用中的角色。
旋轉位置感測技術之工程比較
在馬達驅動的自動化系統中,轉子角度與速度為閉迴路控制的核心狀態變數。目前主流旋轉編碼器技術可分為光電式、磁性式與電感式三類,其工程特性如下。
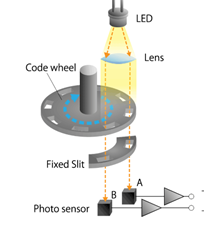
2.1 光電式編碼器
光電式編碼器可提供極高的解析度與線性度,且對外部磁場干擾具有天然免疫力。然而,其結構高度依賴光學元件與精密機械組裝,使其對粉塵、油霧與震動極為敏感。在長時間運轉的工業機器人或智慧產線中,此類環境因素將顯著提高故障率與維護成本。
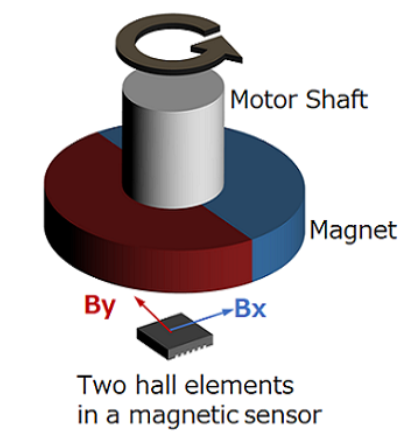
2.2 磁性編碼器
磁性編碼器以低成本與簡化結構著稱,適合對精度要求有限的應用。然而,其量測結果容易受到雜散磁場與磁材老化影響,且組裝公差會導致系統性誤差。對於需依賴 AI 演算法進行即時補償與學習的系統而言,這類不確定性將降低模型可預測性。
2.3 電感式編碼器
電感式編碼器不依賴光學或永磁材料,其量測原理基於電磁感應與渦流耦合,可在高污染、高震動及強磁場環境中維持穩定輸出。相較磁性編碼器,其可提供更高解析度;相較光電編碼器,則具備更佳的環境耐受性與系統簡化優勢,特別適合 AI 與機器人之長時間運作場景。
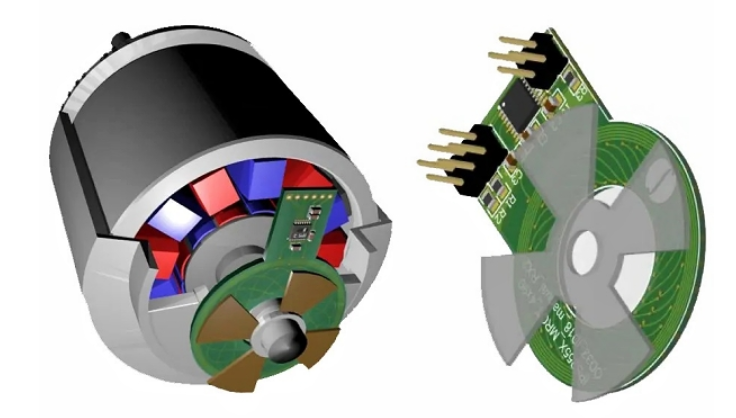
雙電感式位置感測架構與工作原理
雙電感式位置感測器通常由轉子與定子兩組 PCB 結構構成,兩者平行配置並保留微小氣隙。定子 PCB 上配置勵磁線圈,感測器透過高頻正弦訊號激發交變電磁場。轉子與定子上的細線圈與粗線圈在磁場作用下產生渦流耦合,依據法拉第電磁感應定律,在接收線圈上感應出與轉子相對位置相關的電壓訊號。
透過多通道同步解調與數位訊號處理,可將微小的類比感測訊號轉換為高解析度的角度資訊。由於量測結果與機械接觸、磁場方向及光學路徑無關,此架構在工程上具有高度可重複性與一致性。
感測器與AI控制系統的整合優勢
在 AI 驅動的機器人控制系統中,高品質感測資料可顯著提升狀態估測(State Estimation)與控制模型的穩定度。雙電感式位置感測器可提供絕對位置資訊,使系統在上電或異常復歸後無需額外歸零動作,對自主機器人與無人化設備尤為重要。
此外,快速自校準機制可降低製造與維護階段的人工作業需求,使 AI 系統能在一致的感測基礎上進行模型訓練與參數更新,有助於實現預測性維護與自我診斷功能。
工業與汽車安全關鍵應用
在工業機器人、智慧產線以及汽車電子系統中,位置感測器常被應用於安全關鍵功能,例如煞車踏板、轉向系統與節氣閥控制。電感式位置感測器因具備抗污染、耐溫變與抗電磁干擾特性,可滿足此類應用對功能安全與長期可靠度的嚴格要求。
數學模型與誤差分析
6.1 電感式角度感測之基本數學模型
在雙電感式位置感測架構中,定子勵磁線圈以角頻率 ω 產生交變磁場,其磁通量 Φ(t) 可表示為:
Φ(t) = Φ0 · sin(ωt)
當轉子線圈與磁場產生相對運動時,依據法拉第電磁感應定律,感應電壓 Vi(t) 可表示為:
Vi(t) = −Ni · dΦ(t)/dt · k(θ)
其中 Ni 為第 i 組感測線圈匝數,k(θ) 為與轉子角度 θ 相關之耦合係數。透過正交配置的細線圈與粗線圈,可得到近似正弦與餘弦形式的輸出:
Vsin = A · sin(θ) + nsin
Vcos = A · cos(θ) + ncos
角度資訊可藉由反正切函數計算:
θ̂ = tan−1(Vsin / Vcos)
其中 nsin、ncos 為感測雜訊項,主要來自熱雜訊、ADC 量化誤差與高頻電磁干擾。
6.2 分析誤差來源與工程影響
實務系統中,角度估測誤差 εθ 可表示為多項誤差來源之組合:
εθ = f(εgain, εoffset, εphase, nEMI, εtemp)
主要誤差來源包含:
- 增益誤差(Gain Error):線圈製程差異與放大器誤差
- 相位誤差(Phase Error):PCB 幾何不對稱與機械偏移
- 溫度漂移(Thermal Drift):電阻溫度係數造成之振幅變化
- 電磁干擾(EMI):外部高電流設備或馬達切換雜訊
由於電感式感測不依賴磁鐵與光學路徑,其溫度漂移與電磁干擾項相較磁性與光電式方案顯著降低,有利於 AI 控制系統中狀態估測器(如 Kalman Filter)之收斂性與穩定性。
功能安全與國際標準
7.1 ISO 與 IEC 相關規範
電感式位置感測器常被應用於安全關鍵系統,其設計與系統導入須符合以下主要國際標準:
- ISO 26262:道路車輛功能安全
- 適用於煞車、轉向、踏板與驅動系統位置感測
- 要求進行 HARA、FMEA / FMEDA 與診斷覆蓋率分析
- ISO 13849 與 IEC 62061:工業機械功能安全
- 適用於工業機器人與協作型機器人
- 感測系統需支援 PL(Performance Level)或 SIL 評估
- ISO 21448(SOTIF):預期功能安全
- 關注 AI 與自動化系統中非故障但可能導致危害之行為風險
7.2 電感式位置感測器於功能安全架構之工程優勢
在符合 ISO 規範的系統設計中,感測器需具備可預測失效模式與高度量測一致性。電感式位置感測器因其非接觸式架構、不依賴磁鐵或光學元件,且可實作雙通道或冗餘設計,使其更容易滿足 ASIL-B 至 ASIL-D 或 SIL2 / SIL3 系統需求。
結論
本文從工程與系統觀點分析了電感式位置感測技術在 AI 與機器人應用中的優勢。相較傳統感測方案,電感式位置感測器在精度、環境適應性與系統整合層面展現出高度潛力。隨著 AI 控制演算法與邊緣運算能力持續進化,具備高穩定度與高一致性的感測技術,將成為智慧機器人與自動化系統發展的重要基礎。
參考資料
瑞薩官網技術文件 https://www.renesas.com/en/products/sensor-products/inductive-position-sensors
You may also want to know




Links
Follow us on Macnica Galaxy social media




©Copyright 2026 Macnica Galaxy Inc.