
IMU感測技術與無人機慣性導航應用解析

甚麼是慣性測量感測單元 (IMU)?
IMU (Inertial Measurement Unit),即慣性測量單元,是實現自主導航與姿態控制的核心感測器。它通常包含:
- 三軸加速度計 (Accelerometer):用於測量物體在三個正交方向上的線加速度。
- 三軸陀螺儀 (Gyroscope):用於測量物體在三個正交軸上的角速度。
這六個軸向的測量數據構成了常聽到的「6軸IMU」。在許多消費性和商業產品中,它提供即時的X、Y、Z三軸運動資料(加速度、角速度)。然而,IMU的原始數據如果僅進行簡單積分,會導致誤差隨時間累積而產生顯著漂移,這正是純慣性導航系統(INS)面臨的主要挑戰。為了克服這一點,高階IMU模組通常內含高性能微控制器(MCU),搭載採樣演算法、傳感器融合演算法和如卡爾曼濾波器等技術,旨在更方便產品開發者應用,並透過複雜的運算提供物體精確的三維運動姿態,也就是翻滾角 (Pitch)、俯仰角 (Roll)、和航向角 (Yaw) 旋轉角度。
垂直參考單元 (VRU,Vertical Reference Unit) 是一種基於IMU的測量單元。它主要通過算法計算俯仰角和翻滾角,提供姿態資料。 VRU可以輸出運載體的三軸姿態數據,但其提供的航向角 (Yaw) 會隨時間推移累積誤差。 在低動態情況下,加速度計主要測量垂直方向上的重力,因此可以利用重力參考輔助陀螺儀計算,以獲取高頻率且可靠的俯仰角和翻滾角。
姿態航向參考系統 (AHRS) 與擴展卡爾曼濾波器 (EKF)
為了提升慣性導航的精確性與穩定性,特別是解決航向角(Yaw)的漂移問題,許多IMU會額外整合:
- 三軸磁力計 (Magnetometer):用於測量地磁場,並提供磁北作為航向角的方位參考,尤其是在靜態或慢速移動時。
包含了磁力計的IMU便可實現 AHRS (Attitude and Heading Reference System) 姿態和航向參考系統。AHRS目前主流的數據融合技術多是採用卡爾曼濾波器(Kalman Filter),特別是針對非線性系統的擴展卡爾曼濾波器(Extended Kalman Filter, EKF)。
EKF的優勢與好處在於:
- 最佳化多傳感器數據融合:EKF提供了一個數學上嚴謹的框架,用於系統性地融合來自不同傳感器(如高頻的陀螺儀、低頻且易受動態影響的加速度計、以及易受磁場干擾的磁力計)的數據。 它能兼顧各傳感器的特性和誤差模型,以最佳方式組合這些信息,形成對系統狀態(如姿態、速度)更準確的估計,其精度通常比僅使用單一傳感器或簡單融合方法所獲得的估算值更高。
- 有效抑制誤差累積與漂移:慣性傳感器固有的偏置(bias)和隨機遊走(random walk)會導致積分誤差累積。EKF可以對這些傳感器誤差進行精確建模和估計,並將估計結果反饋到系統中進行實時校正。 這種閉環的誤差修正機制,能顯著抑制陀螺儀的漂移和加速度計的重力耦合誤差,從而保證姿態和導航數據的長期穩定性。
- 動態適應性與魯棒性:EKF能更好地應對無人機在複雜環境下的動態變化,例如突然的陣風、機體震動或高速運動。它能夠在不同運動狀態下動態調整估計,並能透過權重調整,在某些傳感器數據質量不佳或受到干擾時(例如磁力計在有金屬的都市環境中),降低其影響,提升系統的魯棒性。
- 提供更全面的狀態估計與不確定性:EKF不僅能估計姿態,還能估計姿態的變化率(角速度)以及傳感器誤差。更重要的是,它能提供這些估計值的不確定性(用協方差矩陣表示),這對下游的飛控系統和測繪數據處理至關重要。
歸納上述說明,IMU提供高頻率的加速度和角速度數據,通過積分可以實時推算載體的姿態、速度和位置。 它的優點是獨立性強,不易受外部環境影響,能提供短時間內的高頻率、高精度運動資訊。 但其核心缺點是誤差會隨時間累計,導致漂移。 AHRS結合磁力計並運用如EKF等先進傳感器融合算法,能夠利用地磁作為航向角的參考,有效改善6軸IMU在航向(Yaw)上因物理特性漂移所造成的誤差累積,顯著提升姿態估計的可靠性和準確性。

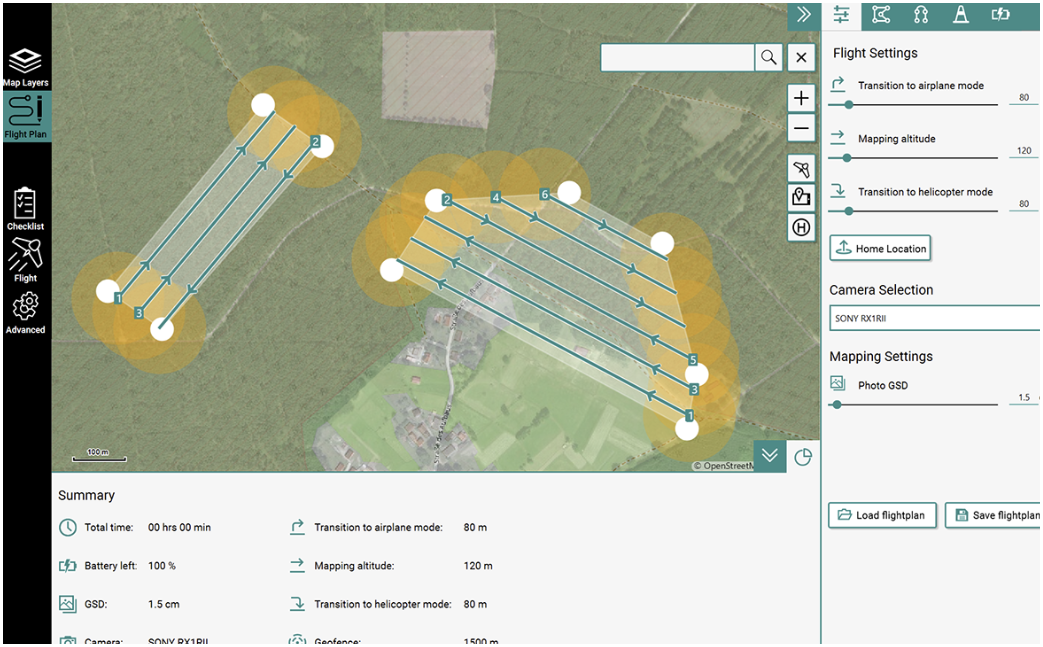
Marlyn 無人機:Xsens IMU賦能毫米級精度測繪的關鍵技術
無人機(UAV)技術正以前所未有的速度革新測繪與地理資訊系統(GIS)領域,透過高解析度的空中影像,實現更快速、更高效的大面積測繪。然而,傳統商業級別的定翼或多旋翼無人機在飛行穩定性、姿態控制及地理定位精度上,尤其是在高風速、複雜都市環境或 GNSS 訊號受限的場域,仍面臨顯著的挑戰與限制。
Atmos UAV 公司推出的 Marlyn 無人機,正是透過結合 VTOL(垂直起降)與定翼設計,以及精選的 Xsens MTi-G-710 (GNSS/INS) 這樣先進的慣性測量解決方案,徹底解決了這些技術瓶頸,為高精度測繪寫下新的典範。

Xsens IMU 在 Marlyn 無人機中所承擔的核心功能
1. IMU 感測架構與捷聯式慣性導航 (SINS)
Marlyn 搭載的 Xsens MTi-G-710 是一款緊湊型、高性能的慣性測量單元(IMU),其內部整合了:
- 三軸加速度計:精確測量機體在三個正交軸向上的線加速度,作為速度和位置估算的基礎。
- 三軸陀螺儀:量測角速度,透過四元數積分或卡爾曼濾波法即時推算姿態(Roll、Pitch、Yaw)。
- 三軸磁力計:測量地磁場強度,為航向(Yaw)提供參考,特別是在 GNSS 資料受限時進行航向校正。
這些感測器數據被集成到捷聯式慣性導航系統 (Strapdown Inertial Navigation System, SINS) 中。慣性導航的核心思想是基於牛頓運動定律,通過對加速度和角速度進行積分來推算位置、速度和姿態。這一過程包含以下關鍵步驟:
- 數據採集 (Data Acquisition):從IMU讀取原始的加速度計和陀螺儀數據。這些數據是傳感器在物體自身座標系(稱作「載體座標系」或「體座標系」)中測量到的。
- 預處理與校準 (Pre-processing & Calibration):對IMU傳感器數據進行校準,以修正偏置(Bias)、尺度因子(Scale Factor)、軸向非正交誤差(Misalignment Error)等固有誤差,並進行溫度補償和雜訊濾波,以提高數據準確性。
- 姿態解算 (Attitude Estimation):這是慣性導航的第一步,也是最關鍵的一步。利用陀螺儀測量的角速度數據,通過四元數積分等方法,實時更新物體的姿態。加速度計數據則用於修正俯仰角和翻滾角,而磁力計提供航向角的參考,共同克服陀螺儀長時間積分導致的姿態誤差累積。
- 速度解算 (Velocity Estimation):一旦姿態確定,將加速度計在載體座標系中測量的比力轉換到導航座標系,扣除重力加速度影響後,對加速度進行第一次積分,即可得到物體在導航座標系中的速度。
- 位置解算 (Position Estimation):對速度進行第二次積分,即可得到物體在導航座標系中的位置,這一步需要一個精確的初始位置作為起點。
這一連串複雜過程的實現,不僅保證了 Marlyn 在複雜飛行環境中的穩定性,也確保了高精度測繪成果的產出。
2. 高精度姿態解算與低延遲反應
Xsens MTi-G-710 提供高達 400Hz 的數據輸出率,以及低於 2ms 的低延遲反應,能即時修正因陣風、機體震動等造成的姿態擾動。這對於 Marlyn 在大風環境下的測繪飛行尤其關鍵,有效避免影像模糊或多影像拼接錯誤,確保測繪成果達到毫米級精度。此外,透過姿態融合演算法(例如擴展卡爾曼濾波EKF),IMU 可將高頻響應的陀螺儀數據與低頻響應的加速度計、磁力計數據進行系統性融合,兼顧短期動態響應與長期穩定性,實現姿態估計的連續高精度輸出。
3. 多感測器融合實現定位精度
慣性導航系統的優勢在於其高更新率和獨立性,但其固有挑戰是誤差累積。因此,傳感器融合是實現長期高精度定位的關鍵。在 GNSS 訊號良好的區域,IMU(即此處的Xsens MTi-G-710,已整合GNSS接收器)可利用 GNSS 資訊進行誤差修正,進一步消除慣性導航的誤差累積效應(如偏置漂移),從而提供更精確的絕對位置。 28 即使在城市峽谷、林地或其他 GNSS 訊號微弱甚至完全受阻的環境下,IMU 也能透過其獨立的慣性推算能力維持短期的飛行控制與測繪精度 29,確保無人機能穩定地完成任務,等待GNSS信號恢復,這極大地增強了系統的魯棒性和適用性。
技術細節的市場應用場景
- 高風速與惡劣天氣環境的測繪
Marlyn 無人機具備 6 級風速(約 45 公里/小時)抗風能力,適用於海岸線、山地及極端氣候區域的測繪任務。IMU 透過高頻姿態輸出及即時補償,讓測繪作業即使在強風或亂流中依舊能獲取穩定影像與精準定位,這對於風力發電場、離岸設施的建設監測尤為重要。 - 基礎建設與智慧城市應用
在城市高樓林立或橋梁、高架道路等 GNSS 容易受阻的環境中,IMU 能彌補 GNSS 訊號遮蔽問題,確保測繪資料的連續性和精確度。這在智慧城市的三維建模、交通監測及建設管理中具有極大市場潛力。 - 農業及林業監測
Marlyn 可搭載多光譜及熱影像相機,應用於精準農業、病蟲害監測、作物健康分析等。IMU 技術的高穩定性使得大範圍農田及林區的航測工作更具效率與可靠性。 - 國土測繪與災害應變
在地震、洪水或山崩等災害發生後,Marlyn 結合 IMU 的高精度測繪能力,能快速取得災區的即時地形資料,協助救災決策與災後重建評估。
結語
Xsens MTi-G-710 以其精巧、低功耗、高性能的設計,為 Marlyn 無人機注入了穩定的姿態控制與精確的地理定位能力,讓其在全球高精度測繪市場中脫穎而出。未來,隨著感測器融合技術及 AI 自動化的進一步發展,IMU 將在智慧交通、機器人導航、自駕車、自駕船艇…等多元領域持續發揮關鍵作用。
You may also want to know





相關連結
追蹤我們的社群平台!




©Copyright 2026 Macnica Galaxy Inc.